


Инженеры создали четырехногого роботаракана по имени HAMR-F, оснащенного системой автономного питания. Он бегает по ровным поверхностям, достигая скорости 17,2 см в сек, ходит боком, прыгает и заезжает вверх по наклонным поверхностям.
Ученые из Гарварда под руководством Роберта Вуда разработали маленького роботаракана, имеющего длину 4,5 см. В отличие от подобных моделей, разработчики не использовали электромоторы, так как с ними трудно управлять направлением движения точно.
 Для каждой ноги применили два пьезоэлектрических актуатора: один двигает ногу горизонтально, а второй – вертикально. Их можно активировать в одно время с разной силой и так точно управлять движениями. Авторы проекта показали, что устройство может быстро поворачиваться, ходить боком, прыгать и подниматься по наклонной поверхности.
Для каждой ноги применили два пьезоэлектрических актуатора: один двигает ногу горизонтально, а второй – вертикально. Их можно активировать в одно время с разной силой и так точно управлять движениями. Авторы проекта показали, что устройство может быстро поворачиваться, ходить боком, прыгать и подниматься по наклонной поверхности.
В роботе использовано 8 актуаторов, которым необходимо напряжение в 200-250 В. Из-за этого пришлось уместить в аппарате блок питания, который повышает напряжение. Чтобы робот управлялся дистанционно, ученые установили антенну и батарею на 8, 10 или 25 мА/ч. С самой мощной батареей роботаракан может бегать 4,5 мин на скорости 15 см в сек (один раз робота разогнали до 17,2 см в сек).
Популярное: «Муж закрутил роман с…»: Брак Нонны Гришаевой затрещал по швам
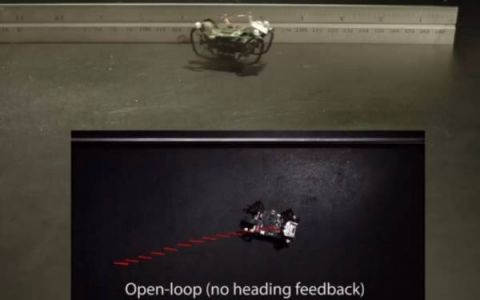
Сначала при ходьбе вперед прототип поворачивал и двигался по кругу. Разработчики добавили гиростабилизатор и программу, постоянно корректирующую шаги, чтобы «таракан» научился бегать прямо. Позже создатели модели собираются добавлять в прибор новые датчики и трудиться над тем, чтобы увеличить его автономность.


